Nye piezoelektriske aktuatorer leverer forbedret haptisk tilbakekobling for bærbare berøringsskjermer
Bidrag fra DigiKeys nordamerikanske redaktører
2020-02-13
Brukergrensesnitt på berøringsskjerm er i ferd med å bli allment utbredt på grunn av de klare fordelene over mekaniske grensesnitt. For forbrukere er grensesnittet elegant og intuitivt, og for industrielle brukere gjør et forseglet display at man unngår problemer med skitt og fuktighet. Men finnes ulemper for begge brukergruppene. Forbrukere kan kanskje savne lettvintheten ved å klikke på en mekanisk bryter, mens industrielle brukere kan få problemer med å bekrefte et trykk på en knapp hvis berøringsskjermen brukes med hansker på hendene.
Haptisk tilbakekobling, der vibrasjoner indikerer bruk av knapper, er blitt brukt for å adressere mangelen på følelse fra berøringsskjermer, men de eksisterende løsningene har en tendens til å være plasskrevende og komplekse mekaniske systemer. Disse omfatter vibrasjonsmotorer med eksentrisk roterende masse (eccentric rotating mass – ERM) og lineære resonante aktuatorer (LRA-er). Piezoelektrisk haptisk tilbakekobling tilbyr et mer kompakt og fleksibelt alternativ. Inntil nylig gjorde imidlertid den høye driftsspenningen det vanskelig å bruke den i enheter med lavt strømforbruk – et helt nødvendig krav til batteridrevne sluttprodukter.
Nå, med fremskritt innen piezoelektriske «høyoppløselige» haptiske løsninger, adresseres ikke bare bekymringene for strømforbruket, men det gis også andre fordeler til haptisk grensesnittutforming, f.eks. en kompakt og lavprofilert formfaktor, høy effektstimulering og rask responstid.
Denne artikkelen forklarer kort fordelene med nye piezoelektriske haptiske aktuatorer sammenlignet med ERM-er og LRA-er, og presenterer en ny generasjon enheter som er basert på flerlagsstrukturer og topolede driftsmoduser som, sammen med effektive og dedikerte drivere, retter opp i tidligere problemer med strømforbruket. Artikkelen viser deretter hvordan en tekniker kan dra nytte av disse aktuatorene og driverne i sitt neste produkt med berøringsskjerm med haptisk tilbakekobling, ved bruk av haptiske eksempler fra TDK og drivere fra Boréas Technologies og Texas Instruments (TI).
Alternativer for haptisk tilbakekobling
Konstruktører som ønsker å legge til haptisk tilbakekobling i sine berøringsskjermgrensesnitt, har tre alternativer å velge blant: ERM-er, LRA-er og piezoelektriske aktuatorer. Alle tre fungerer etter det samme grunnprinsippet, der en mikrostyring styrer driften og en driver styrer en aktuator for å skape vibrasjon (figur 1). Forskjellene ligger i hvordan vibrasjonen skapes: ERM-en bruker en eksentrisk rotasjonsvekt, LRA-en bruker en magnetisk vekt som henger i spolefjær og den piezoelektriske enheten er avhengig av (reversert) piezoelektrisk effekt som skaper en endring i dimensjonene i et krystall- eller keramikkobjekt når det utsettes for et elektrisk felt.
 Figur 1: Haptiske berøringsskjermsystemer består av en mikrostyring, driver og aktuator. I dette eksempelet er aktuatoren en piezoelektrisk enhet, men ERM-er og LRA-er er populære alternativer. (Bildekilde: Boréas Technologies)
Figur 1: Haptiske berøringsskjermsystemer består av en mikrostyring, driver og aktuator. I dette eksempelet er aktuatoren en piezoelektrisk enhet, men ERM-er og LRA-er er populære alternativer. (Bildekilde: Boréas Technologies)
ERM-er og LRA-er har vist seg å være populære i bærbare konstruksjoner, mest fordi de tilbyr laveffekt (ca. 3 volt) og krever en enklere driverkonstruksjon. Som en kontrast krever vanlige piezoelektriske enheter mye høyere spenning (opptil 200 volt) for å skape tilstrekkelig mekanisk formendring til å gi en god forbrukeropplevelse. Disse høyspenningene er nødvendige fordi tradisjonell teknologi for piezoelektriske haptiske drivere vanligvis er basert på nedskalert audioforsterkerteknologi, i stedet for å være konstruert fra bunnen av med tanke på lav effekt. En ekstra konstruksjonsutfordring har vært mangelen på dedikerte haptiske aktuatordrivere med lav effekt, noe som har tvunget konstruktørene til å bruke mindre effektive løsninger.
En viktig fordel med piezoelektriske løsninger har imidlertid vært at de støtter høyoppløselige haptiske løsninger som forsterker tilbakekoblingen utover enkel, monoton vibrering. Piezoelektriske aktuatorer kan for eksempel produsere vibrasjoner som varierer i frekvens og amplitude, og kan brukes til å illustrere forskjellige utfall etter å ha trykket på én enkelt knapp (figur 2).
") Figur 2: Piezoelektriske haptiske aktuatorer muliggjør en rekke forskjellige vibrasjoner som kan brukes til å illustrere forskjellige utfall etter å ha aktivert én enkelt knapp. (Bildekilde: Boréas Technologies)
Figur 2: Piezoelektriske haptiske aktuatorer muliggjør en rekke forskjellige vibrasjoner som kan brukes til å illustrere forskjellige utfall etter å ha aktivert én enkelt knapp. (Bildekilde: Boréas Technologies)
Oppsummert krever løsninger med høyoppløselig haptisk tilbakekobling følgende:
- God båndbredde for å aktivere en rekke forskjellige vibrasjonsfrekvenser og -moduser
- Høy akselerasjon [g] for sterkere tilbakekoblingskraft
- Stor forskyvning som øker den haptisk tilbakekoblingens følsomhet
- Lav latenstid, da rask responstid øker utvalget av tilbakekoblinger
Tabell 1 oppsummerer ytelsen til hver av de forskjellige løsningene for haptisk tilbakekobling og demonstrerer at piezoelektriske løsninger er det eneste valget for bruksområder med høy oppløsning, siden de tilbyr den påkrevde kombinasjonen av båndbredde, tilbakekoblingskraft og -følsomhet og latenstid.
|
Tabell 1: Sammenligning av de driftsmessige karakteristikkene ved haptisk tilbakekoblingsløsninger. Piezoelektriske enheter tilbyr god akselerasjon (målt i ‘g’ der 1 g er akselerasjonen fra gravitasjonen ved jordens overflate (9,81 m/s2)), forskyvning og responstid, og tilpassede bølgeformer som kreves for haptisk tilbakekobling. (Bildekilde: DigiKey, via forfatter)
Merk at deler av den ekstra driverkompleksiteten i piezoelektriske aktuatorer kommer av tilleggsfunksjonene som trengs for å generere tilpassede bølgeformer som gir den haptisk tilbakekoblingen definisjon og kontekst. ERM og LRA kan ikke støtte tilpassede bølgeformer, så driverne er enklere.
Fordelene med nye enheter med piezoelektrisk haptisk tilbakekobling
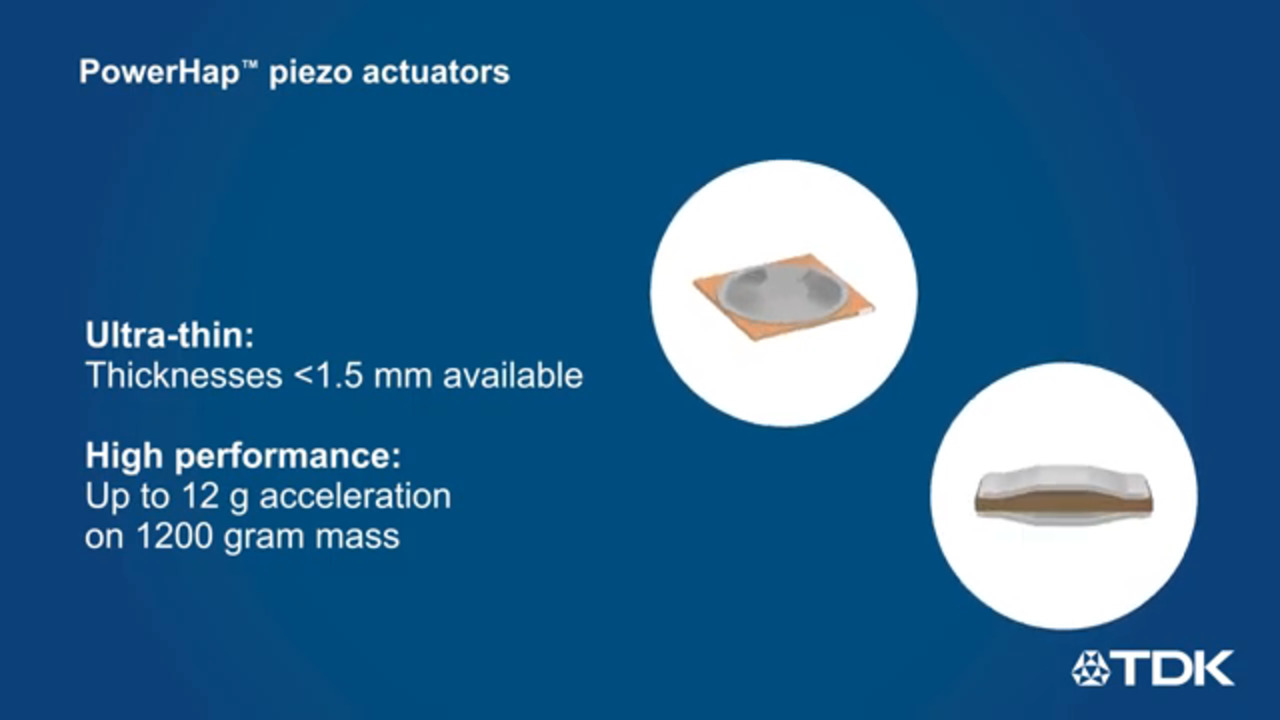
Nylige produktlanseringer av både piezoelektriske aktuatorer og effektive, dedikerte drivere har gjort teknologiene til en mye bedre løsning for batteridrevne produkter. For eksempel er nylig lanserte piezoelektriske haptiske produkter så som TDKs PowerHap B54102H1020A001 (12,7 kvadratmillimeter (mm2) i areal) og B54101H1020A001 (26 mm2) under 2,5 mm høye og bruker en flerlagsstruktur i stedet for enkeltlaget som brukes av enheter som er basert på audioforsterkerteknologi. Denne flerlagsstrukturen letter til en viss grad på kravene som stilles til driveren ved å senke driverspenningen (til mellom 60 og 120 volt).
Hvert lag i TDKs flerlagsprodukt utvides bare litt i z-retningen på grunn av den reverserte piezoelektriske effekten. Men fordi den piezoelektriske enheten må opprettholde et konstant volum, trekker lagene seg samtidig sammen i x- og y-dimensjonene.
TDK-produktet forsterker mekanisk denne sammentrekkingen ved hjelp av et par cymbaler i hver ende av den piezoelektriske enheten for å øke z-aksens bevegelse med en faktor på 15, noe som fører til en forskyvning på mellom 35 og 65 mikrometer (µm) avhengig av modell (figur 3). Under en belastning på 100 gram (g) (enpolet drift, enkeltpuls sinusbølge, 200 Hz) oppnår den større TDK-aktuatoren en akselerasjon på 30 g topp til topp etter bare 1 millisekund (ms). Frekvensområdet på 1 til 1000 hertz (Hz) lar konstruktører spesialtilpasse profiler for haptisk tilbakekobling med høy oppløsning.
 Figur 3: TDKs piezoelektriske haptiske aktuatorer bruker en flerlagsstruktur og cymbaler til å forsterke z-aksens bevegelse. (Bildekilde: TDK)
Figur 3: TDKs piezoelektriske haptiske aktuatorer bruker en flerlagsstruktur og cymbaler til å forsterke z-aksens bevegelse. (Bildekilde: TDK)
TDKs piezoelektriske haptiske aktuatorer kan brukes i enten enpolet eller topolet modus. Enpolet betjening benytter en positiv spenning på tvers av aktuatoren, mens topolet betjening varierer spenningen mellom positiv topp og negative verdier. Fordelen med topolet betjening er at man kan oppnå større forskyvning for samme topp til topp-spenning, eller lik forskyvning kan oppnås med lavere topp til topp-spenning. Ulempen er at topolet betjening øker den mekaniske og elektriske belastningen på aktuatoren (figur 4).
 offers the same mechanical displacement as unipolar") Figur 4: Topolet betjening (høyre) tilbyr samme mekaniske forskyvning som enpolet, men bruker en lavere topp til topp-spenning. (Bildekilde: TDK)
Figur 4: Topolet betjening (høyre) tilbyr samme mekaniske forskyvning som enpolet, men bruker en lavere topp til topp-spenning. (Bildekilde: TDK)
Silisiumleverandører har også nylig lansert driverbrikker som er spesialkonstruert for bruksområder med haptisk tilbakekobling. Disse forbedrede konstruksjonene kan produsere en rekke vibrasjonsmoduser over et godt frekvensområde, og tilby enpolet eller topolet betjening mens de betjenes med langt høyere effektivitet enn tidligere konstruksjoner. Eksemplene omfatter Boréas Technologies’ BOS1901CQT piezohaptiske driver og Texas Instruments’ DRV2667 motordrevet driver.
Boréas Technologies’ IC er en enkeltbrikke-piezoaktuatordriver som inkluderer energiinnhentingsteknologi, og som kan generere flere vibrasjonssignaler. Brikken kan betjene aktuatorer med opptil 190 voltpk-pk fra en 3 til 5,5 volt forsyning. BOS1901 bruker et høyhastighets serielt periferigrensesnitt (SPI), og alle innstillingene er justerbare via en digital front-end. Det har en typisk oppstartstid på under 300 mikrosekunder (μs), det vil si lav latenstid.
TI-brikken er en piezoelektrisk haptisk driver med en integrert 105 volt opptransformeringsbryter (boost-bryter) og en digital front-end som kan betjene aktuatorer med både høy og lav spenning. Den digitale front-enden fratar mikroprosessoren byrden med generering av pulsbreddemodulasjon (PWM) eller behovet for ekstra analoge kanalkrav i vertssystemet. Brikken inkluderer dedikert minne for å lagre og hente frem bølgeformer i tillegg til en avansert bølgeformsyntetisator. En typisk oppstartstid på 2 ms begrenser latenstiden, og termisk overbelastningsbeskyttelse hindrer at enheten blir ødelagt hvis den overstyres.
Piezohaptisk systemkonstruksjon
Både Boréas- og TI-brikken er konstruert for å brukes i et berøringsaktivert system som allerede omfatter en applikasjonsprosessor. Prosessoren utløser eksekvering av den haptiske tilbakekoblingen via en SPI. Konstruktøren kan eventuelt bruke en analog innmating for å utløse haptiske effekter (figur 5).
 Figur 5: Applikasjonskrets som viser TI DRV2667 motordrevet driver. Haptiske hendelser utløses av berøringsskjermens applikasjonsprosessor, deretter driver TI-brikken den piezoelektriske haptiske enheten. (Bildekilde: Texas Instruments)
Figur 5: Applikasjonskrets som viser TI DRV2667 motordrevet driver. Haptiske hendelser utløses av berøringsskjermens applikasjonsprosessor, deretter driver TI-brikken den piezoelektriske haptiske enheten. (Bildekilde: Texas Instruments)
På grunn av integrasjonsnivået i de nyeste driverne er konstruksjonen av berøringsskjermsystemer med piezoelektrisk haptisk tilbakekobling blitt enklere, men noen komponentvalg er viktige for å optimalisere konstruksjonens ytelse. For eksempel bør opptransformeringsspenningen (boost-spenning / boost voltage – BST) være 5 volt høyere enn toppspenningen som piezoaktuatoren blir utsatt for. Dette gir forsterkeren noe slingringsmonn og stilles inn ved hjelp av motstandsdelernettverket R1/R2, som vises i figur 5.
Formelen for å beregne motstandsverdien: V(BST) = V(FB) x (1 + R1/R2), der V(FB) = 1,32 volt.
Hvis du f.eks. vil oppnå TI-driverens maksimale V(BST)-kapasitet på 105 volt, må R1- og R2-verdiene være henholdsvis 768 kiloohm (kΩ) og 9,76 kΩ.
Toppen av opptransformeringsstrømmen (boost-strøm) kommer gjennom forsyningen via induktor L1. Strømmen fastsettes av R(EXT), men man må være forsiktig så man velger en induktor som kan håndtere den programmerte strømgrensen (ILIM). Forholdet mellom R(EXT) og ILIM fastsettes av formelen:
![]()
Der K = 10 500, VREF = 1,35 volt, RINT (driverens indre motstand (resistans)) = 60 Ω, og ILIM = toppstrømgrensen for L1.
Valget av induktor er viktig for å sikre best mulig driverytelse. Når det gjelder TI-brikken, er anbefalt induktans fra 3,3 til 22 mikrohenry (μH). Vurderingen er om man vil velge høyere induktans for å senke svitsjetapene i kraftomformeren (for opptransformering) eller en lavere induktans for å maksimere utgangsstrømmen.
De viktigste elektriske spesifikasjonene for den piezohaptiske aktuatoren mht. driveren er nominell spenning og kapasitans. Ved TI-driverens maksimale frekvens på 500 Hz, for eksempel, er enheten optimalisert for å drive opptil 50 nanofarad (nF) ved 200 volt pk-to-pk (driverens høyeste mulige spenningssvingning). Brikken kan drive større kapasitanser hvis den programmerte opptransformeringsspenningen (boost-spenning) senkes og/eller brukeren f.eks. begrenser inngående frekvensområde til 300 Hz.
Et annet viktig komponentvalg er kraftkondensatoren (boost-kondensator) (C(BST)). Kondensatoren må ha en nominell spenning på minst det samme som opptransformeringsspenningen (boost-spenning), helst høyere. For eksempel anbefales en 250 volt nominell, 100 nF kondensator av X5R- eller X7R-typen ved kjøring på TI-brikkens maksimale opptransformeringsspenning (boost-spenning) på 105 volt. C(BST) må ha en minimum driftskapasitans på minst 50 nF. For V(BST) fra 30 til 80 volt er en 100 volt nominell, 100 nF kondensator akseptabelt, og for V(BST) lavere enn 30 volt, anbefales en 50 volt, 0,22 mikrofarad (μF) kondensator.
Bruk av en bulkkondensator (CBULK) ved siden av induktoren anbefales på grunn av bryterpinnens strømkrav. En keramisk kondensator av X5R- eller X7R-typen med en kapasitans på minst 1 μF anbefales.
Utviklingsverktøy
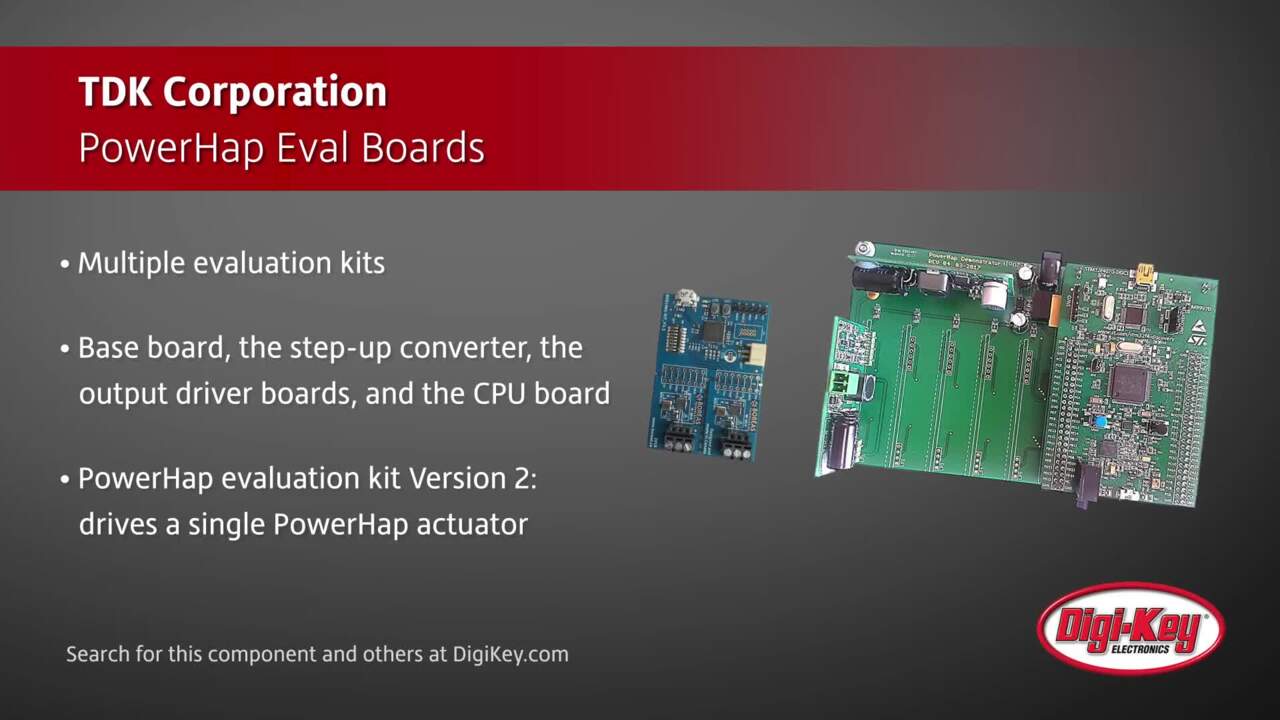
For teknikere som ønsker å eksperimentere med TDKs piezoelektriske haptiske aktuatorer før man bestemmer seg for maskinvare, tilbyr selskapet et enkanals PowerHap-evalueringssett, Z63000Z2910Z 1Z 1. Settet består av et basiskort, en trinn opp-omformer, et utgangsdriverkort og et mikrostyringskort.
Settet leveres med konfigureringsprogramvare som kjører på en PC med Windows 7 (eller nyere). Når programvaren er lastet inn, kobles settet til PC-en med en USB-kabel og drives via strømforsyning på 12 volt (DC – likestrøm). Programvaren tilbyr da et grensesnitt for å konfigurere den haptiske responsen fra aktuatoren når den trykkes på. Grensesnittet gjør det mulig å konfigurere følgende signalparametere (figur 6):
- Amplitude – 5 til 100 prosent (115 volt)
- Frekvens – 20 til 300 Hz
- Bølgeform (trapesformet, kvadratisk bølge, sagtannbølge)
- Trapesformet driftssyklus – 35 til 75 prosent
- Pulsantall – 1 til 1000
- Utløsernivå – 0 til 12 volt (jo lavere utløsernivå, desto hardere må aktuatoren trykkes inn for å aktivere signalet)
- Forsinkelsestid (ingen kraft oppdages av aktuatoren i løpet av denne tiden)
 Figur 6: TDK PowerHap-evalueringssettprogramvaren presenterer et signalkonfigureringsgrensesnitt. Etter innstilling kan konfigurasjonen sendes til evalueringskortets prosessor via «Transmit configuration»-knappen. (Bildekilde: TDK)
Figur 6: TDK PowerHap-evalueringssettprogramvaren presenterer et signalkonfigureringsgrensesnitt. Etter innstilling kan konfigurasjonen sendes til evalueringskortets prosessor via «Transmit configuration»-knappen. (Bildekilde: TDK)
Programvaren lar også teknikeren lage tilpassede bølgeformer. Når programvaren er konfigurert, blir informasjonen sendt til settets prosessor via USB-kabelen.
Et andre evalueringssett, PowerHap Z63000Z2910Z1Z44, er beregnet spesifikt på teknikere som drar nytte av Boréas BOS1901CQT piezohaptiske driver. Dette settet omfatter et basiskort, en oppomformer, to drivere og en mikrostyring. Basissettet leveres med én TDK-piezoelektrisk haptisk aktuator (figur 7).
 Figur 7: TDKs Z63000Z2910Z1Z44 PowerHap-evalueringssett bruker Boréas piezohaptiske drivere og samsvarer med USB-audioprotokollen, noe som forenkler konfigureringen. (Bildekilde: TDK)
Figur 7: TDKs Z63000Z2910Z1Z44 PowerHap-evalueringssett bruker Boréas piezohaptiske drivere og samsvarer med USB-audioprotokollen, noe som forenkler konfigureringen. (Bildekilde: TDK)
Kortet kobles til en PC via en USB-kabel, bruker standard USB-lydprotokoll og vises som en vanlig lydutgang på en hvilken som helst datamaskin. Bølgeformprototyping (opptil 190 voltpk-to-pk) og avspilling kan gjøres med USB-audioprotokollen for å prototype haptiske effekter i programvare som MATLAB, Python og Audacity.
Konklusjon
Haptisk tilbakekobling ved hjelp av piezoelektriske aktuatorer, ERM-aktuatorer og LRA-aktuator har forbedret berøringsskjermstyringen i både forbruker- og industribruksområder. Uansett, fremskritt innen lavspente, kompakte piezoelektriske haptiske aktuatorer har utvidet fordelene ved haptisk tilbakekobling med høy oppløsning i batteridrevne enheter.
Samtidig er konstruksjonen av piezoelektriske haptiske systemer blitt enklere med lanseringen av dedikerte drivere som samhandler med populære applikasjonsprosessorer og tilbyr støtte for en rekke forskjellige bølgeformer. Den enkle tilgjengeligheten av evalueringssett for disse enhetene fra leverandører som TDK gjør det mulig med eksperimentering og prototyping før man bestemmer seg for maskinvarekonstruksjonen.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.