Slik implementerer du raskt posisjonering av GNSS-moduler med flere konstellasjoner
Bidrag fra DigiKeys nordamerikanske redaktører
2021-09-09
Bruken av posisjonsbaserte funksjoner ved hjelp av multikonstellasjonelle globale navigasjonssatellitsystem (GNSS) -mottakere for Europas Galileo, USAs globale posisjoneringssystem (GPS), Russlands GLONASS, Kinas BeiDou-navigasjonssatellitsystem og Japans QZSS vokser på tvers av en rekke bruksområder, inkludert robotteknologi, autonome kjøretøy, industriell automatisering, logistikk og sporing av eiendeler, droner og landbruks- og tungt byggeutstyr. Fordelene ved å bruke GNSS-mottakere med flere konstellasjoner inkluderer; bedre tilgjengelighet av posisjon, navigasjon, timing (PNT) -signaler, økt nøyaktighet og integritet og forbedret applikasjonens robusthet.
Men å utvikle multikonstellasjonsmottakere er en kompleks og tidkrevende aktivitet som inkluderer: optimalisering av L-båndantennen; utforming av radiofrekvensens (RF) frontende; integrering av basbåndsignalbehandlingsalgoritmer for å innhente, spore og anvende korreksjoner på de forskjellige PNT-signalene; koding av applikasjonens behandlingsprogramvare for å trekke ut PNT-data fra hver kanal av basebåndet og bruke informasjonen til å implementere systemfunksjoner. Designere må også velge en passende antenne og plassere den riktig.
Som et alternativ kan designere bruke forhåndsutviklede GNSS-moduler og utviklingsmiljøer for å raskt og effektivt integrere posisjoneringskapasitet i et system. Disse GNSS-modulene inkluderer RF-front-end, baseband-prosessering og den innebygde fastvaren for å fremskynde utviklingen av programvare for prosessering i utruestningen. Noen GNSS-moduler inkluderer også antennene.
Denne artikkelen tar for seg det grunnleggende i GNSS, PNT og driften av GNSS-mottakere med flere konstellasjoner. Den ser deretter på fordelene og ulempene ved å integrere antenner i GNSS-moduler før den introduserer flere GNSS-moduler - med og uten integrerte antenner – samt tilhørende evalueringskort fra STMicroelectronics, Septentrio og Würth Elektronik som designere kan bruke til effektiv og kostnadseffektiv utvikling av nøyaktige og robuste posisjonsbaserte applikasjoner.
Hva er GNSS og PNT?
GNSS og PNT er nært beslektede begreper. GNSS-satellitter er den vanligste kilden til PNT-signaler. GNSS-satellitter er i hovedsak svært nøyaktige synkroniserte klokker som konstant sender PNT-informasjonen sin. En GNSS-modul mottar PNT-signaler fra en gitt satellitt og beregner avstanden fra denne satellitten. Når mottakeren kjenner avstanden til minst fire satellitter, kan den anslå sin egen posisjon. Nøyaktigheten til posisjonsestimeringen påvirkes imidlertid av en rekke feilkilder, herunder:
- Klokkedrift av tidskretser i GNSS-satellitter
- Unøyaktigheter i forutsigelsen av GNSS-satellittenes nøyaktige baneposisjon
- Generell ytelsesavvik i det totale satellittutstyret i forhold til andre satellitter, ellers kjent som satellittforspenninger
- Forvrengninger og forsinkelser i signaloverføringen når den passerer gjennom ionosfæren og troposfæren.
- Flerveis refleksjon og variabel ytelse og drift i mottakeren
Det finnes ulike teknikker som er tilgjengelige for designere for å korrigere for satellittbaserte og atmosfæriske GNSS-feil.
Forbedre GNSS-ytelsen
Den beste måten å minimere virkningen av feil som oppstår i GNSS-mottakeren, er å bruke den høyeste ytelsesmottakeren som passer til kostnads- og størrelsesbegrensningene for en gitt utrustning. Men selv mottakere med høy ytelse er ikke perfekte. Ytelsen kan med stor sannsynlighet forbedres. Det er viktig å forstå disse korreksjonsmetodene siden de gir varierende ytelse, og noen GNSS-moduler er ikke i stand til å implementere dem alle.
Grunnbaserte referansestasjoner brukes av flere GNSS-korreksjonsmetoder (figur 1). De mest etablerte metodene for å bruke bakkebaserte referansestasjoner for å gi GNSS korrigeringer til mottakere er Real-Time Kinematic (RTK) og Precise Point Positioning (PPP). I senere tid har hybride RTK-PPP-metoder blitt tilgjengelige.
 Figur 1: En GNSS-brukermottaker kan få informasjon om atmosfære-, klokke- og banefeil fra et referansenettverk for å forbedre posisjoneringsnøyaktigheten. (Bildekilde: Septentrio)
Figur 1: En GNSS-brukermottaker kan få informasjon om atmosfære-, klokke- og banefeil fra et referansenettverk for å forbedre posisjoneringsnøyaktigheten. (Bildekilde: Septentrio)
RTK er avhengig av en enkelt basestasjon eller et lokalt referansenettverk for å korrigere data som kan eliminere de fleste GNSS-feilene. RTK antar at basestasjonen og mottakeren ligger tett – maksimalt 40 kilometer (25 miles) fra hverandre – slik at de opplever de samme feilene. Post-prosessert Kinematic eller PPK er en variasjon på RTK og er mye brukt i kartlegging og kartlegging for å oppnå posisjonsdata med høy presisjon eller nøyaktighet på centimeternivå.
Bare omløpsbane og satellittklokkefeil brukes til å gjøre PPP-korreksjoner. Disse satellitt-spesifikke feilene er uavhengig av brukerens plassering, noe som begrenser antallet referansestasjoner som er nødvendige. PPP tar imidlertid ikke hensyn til atmosfærerelaterte feil og har derfor lavere nøyaktighet i forhold til RTK. I tillegg kan PPP-korreksjoner ha initialiseringstider på rundt 20 minutter. Den lengre initialiseringstiden og lavere nøyaktighet gjør PPP upraktisk for mange bruksområder.
Applikasjoner som trenger nær-RTK-nøyaktighet og raske initialiseringstider bruker ofte den nyeste GNSS-korrigeringstjenesten, RTK-PPP (noen ganger omtalt som tilstands-rom-representasjon (SSR)). Den bruker et referansenettverk med stasjoner med en avstand på ca. 100 km som samler GNSS-data og beregner en kombinasjon av satellitt- og atmosfærekorreksjoner. Referansenettverket bruker Internett-, satellitt- eller mobiltelefonnettverk til å sende korreksjonsdata til abonnenter. GNSS-mottakere som bruker RTK-PPP, kan ha nøyaktighet på under en decimeter. Valget mellom å bruke RTK-, PPP- og RTK-PPP-korreksjonsmetoder innebærer en rekke designavveininger som utviklerne må gjennomgå for å velge den optimale løsningen for den spesifikke utrustningsprofilen. (Figur 2).
 Figur 2: Styrker og svakheter ved tre vanlige GNSS-korreksjonsmetoder. (Bildekilde: Septentrio)
Figur 2: Styrker og svakheter ved tre vanlige GNSS-korreksjonsmetoder. (Bildekilde: Septentrio)
Satellittbaserte forsterkningssystemer (SBAS) begynner å bli tilgjengelige på regional basis for å erstatte RTK-, PPP- og RTK-PPP-grunnstasjonsbaserte korreksjonsmetoder. SBAS bruker fortsatt bakkestasjoner til å måle GNSS-feil, men stasjonene er spredt over hele kontinenter. De målte feilene behandles på et sentral sted der korreksjonene beregnes og overføres til geosynkrone satellitter over området som dekkes. Korreksjonsdataene sendes fra satellittene som et overlegg eller en utvidelse til de opprinnelige GNSS-dataene.
GNSS-nøyaktigheten avhenger av tilgjengeligheten og nøyaktigheten av satellittmålinger og tilhørende korreksjoner. Høyytelses GNSS-mottakere sporer GNSS-signaler med flere frekvenser og bruker flere GNSS-konstellasjoner og ulike korreksjonsmetoder for å levere den nødvendige nøyaktigheten og elastisiteten. Den resulterende redundansen muliggjør stabil ytelse selv om noen av satellittmålingene og dataene opplever interferens. Designere kan velge mellom en rekke GNSS-nøyaktighets- og redundansmuligheter (figur 3).
 Figur 3: GNSS-nøyaktighetsgrader med tilsvarende korreksjonsmetoder og utvalgte bruksområder. (Bildekilde: Septentrio)
Figur 3: GNSS-nøyaktighetsgrader med tilsvarende korreksjonsmetoder og utvalgte bruksområder. (Bildekilde: Septentrio)
GNSS-moduler: integrerte kontra eksterne antenner
På grunn av kompleksiteten i posisjonering av flere konstellasjoner, er moduler tilgjengelige fra forskjellige leverandører som bidrar til å akselerere tiden til markedet, senke kostnadene og sikre ytelse. Når det er sagt, må designere vurdere om de skal bruke en intern antenne eller i stedet velge en som befinner seg utenfor GNSS-modulen. For bruksområder der tid til markedet og kostnader er en prioritet, kan en integrert antenne være å foretrekke, da det dreier seg om betydelig mindre teknikk. For utrustninger som trenger FCC- eller CE-sertifisering, kan bruken av en modul med en integrert antenne også fremskynde godkjenningsprosessen. Løsningens størrelse kan imidlertid øke, og fleksibiliteten kan være begrenset med integrerte antenneløsninger.
Eksterne antenner gir designere et bredere spekter av ytelses- og layoutalternativer. En stor antenne med høy ytelse eller en mindre antenne med lavere ytelse kan velges. I tillegg er antenneplasseringen mer fleksibel i forhold til plasseringen av GNSS-modulen, noe som ytterligere forbedrer designfleksibiliteten. Plasseringsfleksibilitet gjør det også mulig for eksterne antenner å gi mer pålitelig GNSS-drift. Antenneplassering og tilkoblingsruting kan imidlertid være en kompleks og tidkrevende prosess og krever spesifikk ekspertise, noe som potensielt øker kostnadene og reduserer tiden til markedet.
Liten GNSS-modul for plassbegrensede konstruksjon
Designteam med den nødvendige kompetansen innen antenne plassering og ruting kan bruke STMicroelectronics 'Teseo-LIV3F , en multikonstellasjon (GPS/Galileo/GLONASS/BeiDou/QZSS) GNSS-modul som bruker en ekstern antenne (figur 4). Modulen leveres i en LCC-18-kapsling som måler 9,7 x 10,1 mm, og har 1,5 meter posisjonsnøyaktighet (circular error probable – CEP), med en tid til første fiks (time to first fix – TTFF) for kald og varmstart så lavt som under 32 sekunder, respektive under 1,5 sekund (GPS, GLONASS). Den har et strømforbruk i hvilemodus på 17 mikrowatt (µW) og et sporingseffektforbruk på 75 milliwatt (mW).
 Figur 4: GNSS-modulen Tesco-LIV3F inkluderer GNSS-kjernen og -delsystemene, pluss all nødvendig tilkobling og strømstyring, i en kapsling som måler 9,7 x 10,1 mm. Det krever en ekstern antenne. (Bildekilde, STMicroelectronics)
Figur 4: GNSS-modulen Tesco-LIV3F inkluderer GNSS-kjernen og -delsystemene, pluss all nødvendig tilkobling og strømstyring, i en kapsling som måler 9,7 x 10,1 mm. Det krever en ekstern antenne. (Bildekilde, STMicroelectronics)
Tesco-LIV3Fs innebygde 26-megahertz (MHz) temperaturkompenserte krystalloscillator (TCXO) bidrar til å sikre høy nøyaktighet, og den dedikerte 32 kilohertz (kHz) sanntidsklokken (real-time clock – RTC) oscillatoren muliggjør en redusert tid til første fix (TTFF). Funksjoner som datalogging, syv-dagers autonom assistert GNSS, firmware (FW) rekonfigurasjon, så vel som FW-oppgraderinger, aktiveres av det 16 megabits (Mbit) innebygde flash-minnet.
Utrustninger som er egnet for Tesco-LIV3F inkluderer forsikring, logistikk, droner, bompengesystemer, tyverisikringssystemer, personer og kjæledyr, sporing av kjøretøy og nødanrop.
Som en forhåndssertifisert løsning kan bruk av Teseo-LIV3F-modulen resultere i redusert tid til markedet for den endelige utrustningen. Den har også et driftstemperaturområde fra -40 °C til +85 °C.
For å eksperimentere med modulen og akselerere applikasjonsutvikling kan designere bruke AEK-COM-GNSST31-evalueringskortet. Når den benyttes i forbindelse med firmware X-CUBE-GNSS1 kan evalueringspakken støtte innsamling, sporing, navigasjon og datautgangsfunksjonalitet uten ekstern minnestøtte. Denne EVB-en er også konstruert for bruk med en SPC5-mikrokontroller for utvikling av bilutrustninger.
GNSS-modul med interferensdemping
Septentrios multikonstellasjon-GNSS-mottaker 410322 mosaic-X5 er en lavt energiforbruk, overflatemontert modul som måler 31 x 31 x 4 mm, som gir designere en rekke tilkoblinger, inkludert fire UART-er, Ethernet, USB, SDIO og to brukerprogrammerbare GPIO-er.
Konstruert for bruk i robotikk, autonome systemer og andre massemarkedsapplikasjoner, har mosaic-X5 en oppdateringshastighet på 100 hertz (Hz), en latenstid (forsinkelse) på under 10 millisekunder (ms), og en vertikal og horisontal RTK-posisjoneringsnøyaktighet på henholdsvis 0,6 cm og 1 cm. Den kan spore alle GNSS-konstellasjoner, og støtter nåværende og fremtidige signaler, og er kompatibel med PPP, SSR, RTK og SBAS-korreksjoner. Modulens TTFF har kaldstart på under 45 sekunder og under 20 s varmstart.
Mosaikk-X5 har flere Septentrio patenterte teknologier, inkludert AIM+, en integrert interferensreduserende teknologi som undertrykker en rekke interferenter, fra enkle kontinuerlige smalbåndssignaler til komplekse bredbånds- og pulserende støysendere (jammere).
Modulenes grensesnitt, kommandoer og datameldinger er fullt dokumentert. Den inkluderte RxTools-programvaren tillater mottakerkonfigurasjon og -overvåking, samt datalogging og -analyse.
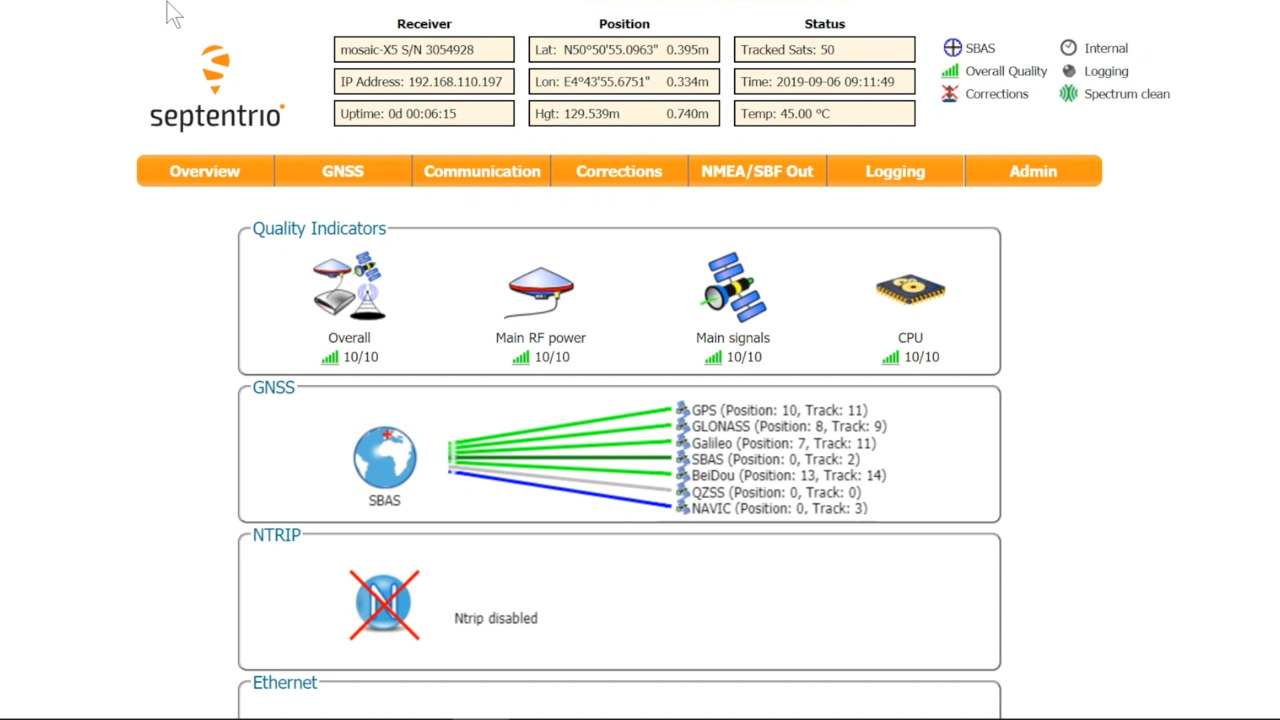
Septentrio sin 410331P3161 mosaic-X5-utviklingssett gjør det mulig for designere å utforske, evaluere og utvikle prototyper som utnytter mosaic-X5 sine muligheter fullt ut (figur 5).
 Figur 5: Designere kan lage en prototype ved hjelp av 410331P3161 mosaic-X5-utviklingssettet ved hjelp av en rekke tilkoblinger, inkludert Ethernet, COM-porter eller USB 2.0, eller ved hjelp av et SD-minnekort. (Bildekilde: Septentrio)
Figur 5: Designere kan lage en prototype ved hjelp av 410331P3161 mosaic-X5-utviklingssettet ved hjelp av en rekke tilkoblinger, inkludert Ethernet, COM-porter eller USB 2.0, eller ved hjelp av et SD-minnekort. (Bildekilde: Septentrio)
Settet bruker mosaic-X5 sitt intuitive nettbrukergrensesnitt for enkel drift og overvåking, slik at utviklere kan styre mottakermodulen fra enhver mobil enhet eller datamaskin. Nettgrensesnittet (webgrensesnittet) bruker lettleste kvalitetsindikatorer for å overvåke mottakerens drift.
Designere kan lage en prototype ved å integrere mosaikk utviklingssettet mosaic dev-kit, ved hjelp av en av følgende tilkoblinger: Ethernet, COM-porter, USB 2.0 og SD-minnekort.
GNSS-modul med integrert antenne
For designere av enheter som kan dra nytte av bruken av en GNSS-modul med en integrert antenne, tilbyr Würth Elektronik 2614011037000 Erinome-I-modulen med en høyytelses system-på-chip (SoC) (figur 6). Modulen støtter GPS, GLONASS, Galileo og BeiDou GNSS-konstellasjonene, og leveres med en integrert antenne på toppen som forenkler maskinvareintegrasjonen og forkorter tiden til markedet. Modulen, inkludert den integrerte antennen, måler 18 x 18 mm.
 Figur 6: 2614011037000 Erinome-I er en komplett GNSS-modul med en høyytelses-GNSS SoC pluss en integrert antenne. (Bildekilde: Würth Elektronik)
Figur 6: 2614011037000 Erinome-I er en komplett GNSS-modul med en høyytelses-GNSS SoC pluss en integrert antenne. (Bildekilde: Würth Elektronik)
På modulen finnes også TCXO, RF-filter, lavstøyforsterker (LNA) og serielt flashminne.
Würth tilbyr også 2614019037001-evalueringskort (EVB) for Erinome-I (figur 7). EVB kan også tjene som referansedesign for integrering av GNSS -modulen i en utrustning. En USB-port kan brukes til å koble evalueringskortet (EVB-et) til en PC. En flerpinners-kontakt gir designerne tilgang til alle pinnene i GNSS-modulen.
 Figur 7: 2614019037001-evalueringskort for Erinome-I (nær midten av kortet, med den integrerte antennen synlig i midten av modulen) fungerer også som en referansedesign. (Bildekilde: Würth Elektronik)
Figur 7: 2614019037001-evalueringskort for Erinome-I (nær midten av kortet, med den integrerte antennen synlig i midten av modulen) fungerer også som en referansedesign. (Bildekilde: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) er et enkelt PC-verktøy for å samhandle med Erinome-I GNSS-modulen ved hjelp av UART-grensesnittet. Den støtter:
- Styring av EVB-drift
- Toveis kommunikasjon med Erinome-I-modulen
- Evaluering av Erinome-I-funksjoner og -muligheter
- Kjennskap til Erinome-I-protokoller, setninger og kommandoer
- Konfigurasjon av Erinome-I uten kunnskap om protokollene
- Parsing av setninger og kommandoer som brukes av Erinome-I
WENSS muliggjør enkel evaluering av posisjoneringutrustninger uten avansert kunnskap. Erfarne utviklere kan også bruke WENSS for mer avanserte konfigurasjoner.
Konklusjon
Nøyaktig og pålitelig posisjoneringsevne oppnås best ved hjelp av flere konstellasjoner med tilhørende støtte for korrigeringsteknologi. Dette er komplekse systemer, men designere kan bruke forhåndsutviklede GNSS-moduler, tilhørende utviklingssett og miljøer for å raskt og effektivt sammenligne alternativer og implementere posisjonsbaserte funksjoner og tjenester.
Anbefalt lesing
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.