Slik integrerer du GaN-effekttrinn for batteridrevne BLDC-motorfremdriftssystemer med høy virkningsgrad
2023-02-22
Batteridrevne konstruksjoner som samarbeidsroboter (cobot), elektriske sykler, industrielle droner og elektroverktøy krever lette og kraftige elektriske motorer med liten formfaktor. BLDC-motorer (børsteløse likestrømsmotorer) er et godt alternativ, men motordrivelektronikken er ganske kompleks, med mange konstruksjonsfaktorer. Konstruktøren må nøye regulere dreiemoment, hastighet og posisjon, samtidig som høy presisjon med minimale vibrasjoner, støy og elektromagnetisk stråling (EMR – electromagnetic radiation) sikres. I tillegg må store kjøleribber og eksterne kabelsett unngås for å redusere vekt, plass og kostnader.
Ofte blir utfordringen til konstruktører å balansere konstruksjonskrav med tid og budsjettpress – samtidig som de må unngå kostbare utviklingsfeil. En måte å gjøre dette på er å dra nytte av raske halvlederteknologier med lavt tap, for eksempel galliumnitrid (GaN), for effekttrinnene som kreves for å drive BLDC-motorene.
Denne artikkelen tar for seg de relative fordelene til GaN-baserte effekttrinn og introduserer en prøveenhet fra EPC, implementert i halvbrotopologi. Den forklarer hvordan tilknyttede utviklingssett brukes for å raskt komme i gang med et prosjekt. I løpet av denne prosessen, vil konstruktører finne ut hvordan de måler parametrene til en BLDC-motor og betjener den i sensorfri modus med feltorienteringsstyring (FOC – field orientation control), med minimal programmeringsinnsats, ved å bruke Microchip Technology sin motorBench-utviklingspakke.
Fordelene til GaN
For å effektivt styre en BLDC-motor i batterikonstruksjoner, trenger utviklere et effektivt, lett drivertrinn med liten formfaktor, som kan implementeres så nærme aktuatoren som mulig. For eksempel, inne i motorhuset.
Topolede transistorer med isolert gate (IGBT – insulated-gate bipolar transistor) er robuste, og de kan veksle høye effekter, opptil 100 megawatt (MW), ved maksimalt 200 kilohertz (kHz), men de er ikke egnet for enheter som må håndtere batterilading ved spenninger på opptil 80 volt. Den høye kontaktmotstanden, friløpsdioden og vekslingstapene, samt den strømførende halen under avkobling, kombineres for å resultere i signalforvrengning, overskytende varmeproduksjon og kunstige utslipp.
MOSFET-er (metal oxide semiconductor field-effect transistor) veksler raskere og har lavere vekslingstap og ohmske tap sammenlignet med IGBT-er, men gate-kapasitansen krever en kraftig gate-driver for å fungere ved høye vekslingsfrekvenser. Det er viktig å kunne være i drift ved høye frekvenser, siden det betyr at konstruktører kan bruke mindre elektroniske komponenter for å redusere de generelle plassbehovene.
Når det gjelder GaN-transistorer med høy elektronmobilitet (HEMT – high-electron-mobility transistors), gjør mobiliteten med høy bærefrekvens det mulig for dem å bygge opp og bryte ned halvlederforbindelser ekstremt raskt og med lave tap. En integrert GaN-driver, for eksempel EPC23102ENGRT, har eksepsjonelt lave vekslingstap og høye vekslingsfrekvenser, noe som muliggjør kompakte konstruksjoner i én del for de trangeste områdene. Den helstøpte brikken inneholder et inngangslogikkgrensesnitt med nivåskiftere, bootstrap-belastning og gate-driverkretser som styrer GaN-utgang-FET-ene i halvbro-topologi (figur 1). Brikkekapslingen er optimalisert for høy varmespredning og lav parasittinduktans.
") Figur 1: EPC23102 inneholder styringslogikk, nivåskiftere, gate-drivere og GaN-utgang-FET-er i halvbro-topologi (venstre). Brikkekapslingen (høyre) er optimalisert for høy varmespredning og lav parasittinduktans. (Bildekilde: EPC)
Figur 1: EPC23102 inneholder styringslogikk, nivåskiftere, gate-drivere og GaN-utgang-FET-er i halvbro-topologi (venstre). Brikkekapslingen (høyre) er optimalisert for høy varmespredning og lav parasittinduktans. (Bildekilde: EPC)
Mindre spillvarme og lavere EMR
EPC23102-utgangstransistorene har en typisk på-motstand (RDS(on)) for drain-kilden på 5,2 milliohm (mΩ) (ved 25 °C). De håndterer spenninger på opptil 100 volt og strøm på opptil maksimalt 35 ampere (A). I tillegg gir den laterale strukturen til GaN-enheten og fraværet av en indre body-diode eksepsjonelt lav gate-ladning (QG) og sperreforsinkelsesladning (QRR).
Sammenlignet med en MOSFET-enhet med en lignende RDS(on), oppnår GaN-driveren opptil fem ganger lavere vekslingstap. Dette gjør det mulig for en GaN-basert inverter (vekselretter) å fungere ved relativt høye pulsbreddemodulasjon-frekvenser (PWM – pulse width modulation) – opptil 3 megahertz (MHz) – og med kortere dødtid (under 50 nanosekunder (ns)).
Høye vekslingshastigheter (dV/dt) og den lave temperaturkoeffisienten til GaN-halvledere, i en kapsling med redusert parasittinduktans, minimerer signalforvrengning, noe som dermed minimerer EMR og vekslingstap. Dette reduserer behovet for filtreringsstrategier, mens de mindre lavpriskondensatorene og -induktorene sparer plass på kortet.
I tillegg til lav kontaktmotstand RDS(på), kombineres GaN-enhetens andre fordeler, for eksempel den høye varmeledningsevnen til GaN-substratet og det store termiske kontaktområdet til komponentkapslingen, for å gjøre det mulig for GaN-effekttrinn å veksle strøm på opptil 15 ampere (A) uten kjøleribbe (figur 2).
") Figur 2: Temperaturstigning kontra fasestrøm for et GaN-effekttrinn med en omgivelsestemperatur på 25,5 °C og ved forskjellige PWM-frekvenser. (Bildekilde: EPC)
Figur 2: Temperaturstigning kontra fasestrøm for et GaN-effekttrinn med en omgivelsestemperatur på 25,5 °C og ved forskjellige PWM-frekvenser. (Bildekilde: EPC)
EPC23102 har også robuste nivåomformere fra lavside- til høysidekanalene, som er konstruert for å fungere under myke og harde vekslingsforhold – selv ved store negative terminalspenninger – og for å unngå falsk utløsning av raske dV/dt-transienter, inkludert de som stammer fra eksterne kilder eller tilstøtende faser. Interne kretser integrerer logikk og funksjoner for bootstrap-strømladning og deaktivering. Beskyttelsesfunksjoner forhindrer uønsket påslåing av utgangs-FET-er når forsyningsspenningene er for lave – eller svikter.
Evalueringssett for bruksklare motorinvertere
Den enkleste og raskeste måten å kommisjonere en trefaset BLDC-motor med GaN-teknologi på, er å bruke EPC sitt EPC9176KIT-evalueringssett for motorinvertere. Den består av motorinverterkortet EPC9176 og et DSP-styringskort. En enkel EPC9147E-styringsadapter som kan plugges inn, for styring via en kundespesifikk vertsstyring, er også inkludert. Koblingskontakten bærer følgende signaler: 3 × PWM, 2 × pulsgiver (enkoder), 3 × Uphase, 3 × Iphase, UDC, IDC og 2 × status-LED.
Som referansekonstruksjon, legger EPC9176-motorinverterkortet til rette for bedriftsintern kretskonstruksjon, mens EPC9147A-styringskortet, når det brukes med Microchip Technology sitt motorBench-utviklingsmiljø, gjør det mulig for brukere å raskt komme i gang uten å måtte bruke tid på koding eller programmering.
Den trefasede BLDC-motorinverteren integrerer tre EPC23102 GaN-halvbrodrivere for å styre AC- eller DC-motorer og DC-DC-omformere (AC – vekselstrøm, DC – likestrøm). Med en RDS(on) på maksimalt 6,6 mΩ, forårsaker effekttrinnet lavt varmetap ved laststrømmer på opptil 28 A spiss (Apk) eller 20 A RMS (ARMS) ved konstant drift med vekslingsspenninger på opptil 100 volt. EPC23102 er konfigurert for flerfaset DC/DC-omforming, og den støtter PWM-vekslingsfrekvenser på opptil 500 kHz og opptil 250 kHz for motordriverkonstruksjoner.
EPC9176-motorinverterkortet på 8,1 × 7,5 cm inneholder alle de kritiske funksjonskretsene som er nødvendige for å støtte en komplett motorinverter, inkludert DC-busskondensatorer, gate-drivere, regulerte hjelpespenninger, fasespenning, fasestrøm og temperaturmåling, i tillegg til beskyttelsesfunksjoner og valgfrie filtre for oversvingninger (harmonics) eller EMR for hver fase (figur 3).
") Figur 3: EPC9176-motorinverteren har DC-busskondensatorer, gate-drivere, en spenningsregulator, spenningsdeteksjon, strøm- og temperaturbeskyttelsesfunksjoner og EMR-filtre. (Bildekilde: EPC)
Figur 3: EPC9176-motorinverteren har DC-busskondensatorer, gate-drivere, en spenningsregulator, spenningsdeteksjon, strøm- og temperaturbeskyttelsesfunksjoner og EMR-filtre. (Bildekilde: EPC)
Den trefasede GaN-inverteren er virksom ved inngangsspenninger fra 14 til 65 VDC. Den veksler uten oversvingning, noe som resulterer i jevnt dreiemoment og minimal kjørestøy. Kortet er optimalisert for en typisk GaN-vekslingshelling med høy hastighet på under 10 volt per ns (V/ns), og den kan, hvis ønskelig, reduseres for å drive en DC-DC-omformer. I tillegg kan to rotorposisjonssensorer (Hall-sensorer) som opererer ved forskjellige spenningsnivåer, kobles sammen.
Vibrasjonsfritt dreiemoment og lav kjørestøy
Et eksempel på en trefaset BLDC-motorimplementering demonstrerer effekten av dødtidsparameterisering på den jevne drift av motoren, og således støygenereringen. Låsetiden ved vekslingsovergangen mellom høyside- og lavside-FET-en for en halvbro basert på GaN-FET-er, kan velges til å være svært liten fordi GaN-HEMT-ene reagerer ekstremt raskt og de produserer ikke parasittoverskridelser – slik som er tilfellet med de langsommere MOSFET-ene.
Figur 4 (venstre) viser en GaN-inverter som fungerer ved en typisk dødtid for MOSFET-er på 500 ns, med en PWM-frekvens på 40 kHz. Det som skal være en jevn sinusformet fasestrøm, viser ekstremt høy forvrengning, noe som resulterer i høy dreiemomentrippel og tilknyttet støy. I figur 4 (til høyre) ble dødtiden redusert til 50 ns, noe som etablerte en sinusformet fasestrøm for en jevnkjørende motor med svært lav støy.
") Figur 4: En dødtid på 500 ns ved en PWM-frekvens (venstre) på 40 kHz, typisk for MOSFET-er, forårsaker høy forvrengning i fasestrømmen, noe som resulterer i høy dreiemomentrippel og høye støynivåer. Med en dødtid på 50 ns (høyre), etableres en sinusformet fasestrøm slik at motoren roterer jevnt med lav støy. (Bildekilde: EPC)
Figur 4: En dødtid på 500 ns ved en PWM-frekvens (venstre) på 40 kHz, typisk for MOSFET-er, forårsaker høy forvrengning i fasestrømmen, noe som resulterer i høy dreiemomentrippel og høye støynivåer. Med en dødtid på 50 ns (høyre), etableres en sinusformet fasestrøm slik at motoren roterer jevnt med lav støy. (Bildekilde: EPC)
Mindre rippel i fasestrømmen betyr også lavere magnetiseringstap i statorspolene, mens mindre rippel i fasespenningen muliggjør høyere oppløsning, samt mer presis styring av dreiemoment og hastighet, spesielt for motorer med lav induktans som brukes i mindre konstruksjoner.
For motordrevne konstruksjoner som krever mer kraft, er to GaN-inverterkort tilgjengelige: EPC9167HCKIT (1 kilowatt (kW)) og EPC9167KIT (500 watt). Begge bruker EPC2065 GaN FET-en, som har en maksimal RDS(on) på 3,6 mΩ og en maksimal enhetsspenning på 80 volt. EPC9167-kortet bruker enkle FET-er for hver vekslingsposisjon, mens EPC9167HC har to FET-er som drives parallelt, og gir en maksimal utgangsstrøm på 42 Apk (30 ARMS). EPC2065 GaN FET-en støtter PWM-vekslingsfrekvenser på opptil 250 kHz i motorstyringskonstruksjoner og maksimalt 500 kHz i DC-DC-omformere.
Enda høyere effekt – opptil 1,5 kW – leveres av inverterkortet i EPC9173KIT. Kortet danner halvbroens grener bestående av to enkle EPC23101ENGRT GaN gate-driver-IC-er som bare har én integrert effekt-FET på høysiden. Dette kortet kan utvides som en spenningsreduksjons-, spenningsøknings-, halvbro-, fullbro- eller LLC-omformer. Den leverer utgangsstrømmer på opptil 50 Apk (35 ARMS) og fungerer ved PWM-vekslingsfrekvenser på opptil 250 kHz, med egnet kjøling.
Få drivertrinnet i gang i løpet av noen få minutter
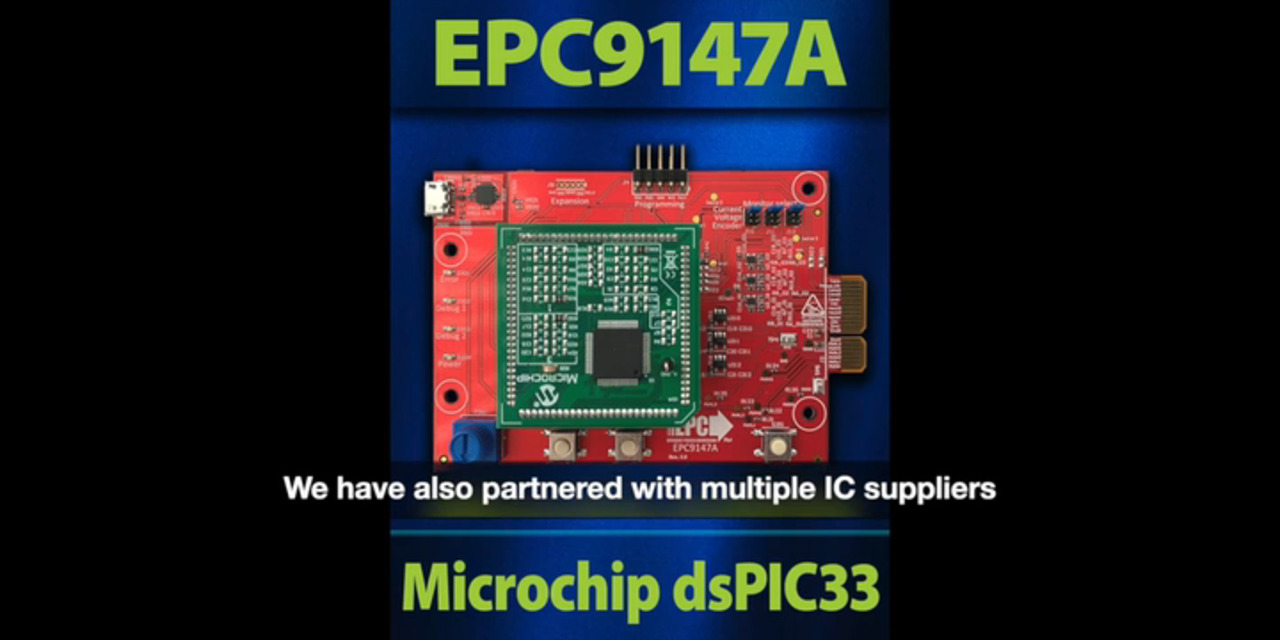
Den raskeste måten å evaluere EPC9176 GaN-inverterkortet på – uten å måtte kode – er å bruke EPC9147A-styringsgrensesnittkortet. En plug-in-modul (PIM) – MA330031-2 – inneholder den 16-bits dsPIC33EP256MC506-I-PT DSP-en fra Microchip Technology (Figur 5).
") Figur 5: Det universelle styringsgrensesnittkortet, EPC9147A, kan romme ulike pluggbare moduler, for eksempel MA330031-2 PIM, som er basert på den 16-bits dsPIC33EP256 DSP-en. (Bildekilde: EPV/Microchip Technology)
Figur 5: Det universelle styringsgrensesnittkortet, EPC9147A, kan romme ulike pluggbare moduler, for eksempel MA330031-2 PIM, som er basert på den 16-bits dsPIC33EP256 DSP-en. (Bildekilde: EPV/Microchip Technology)
For å forenkle driften av DSP-styringsgrensesnittet, kan konstruktører bruke motorBench-utviklingspakken, til hvilken de må legge til:
- MPLAB X IDE_V5.45 og den anbefalte oppdateringen
- Programtillegg for kodekonfigurator (DSP-spesifikk kompilering)
- motorBench plugin 2.35 (motoreksempler)
For denne diskusjonen bruker eksemplet GaN-motorinverterkortet EPC9146, så:
- Begynn med MCLV-2- eller EPC-prosjektet for EPC914xKIT med navnet «sample-mb-33ep256mc506-mclv2.X»
Brukeren kan ganske enkelt velge prøve-hex-filen for EPC9146 GaN-motorinverterkortet og flashe den til DSP dsPIC33EP256MC506 ved å bruke en programmeringsadapter, for eksempel Microchip Technology sin PG164100 for 16-bits mikrokontrollere. Den tilkoblede BLDC-motoren (Teknic_M-3411P-LN-08D) kan deretter styres manuelt via styringene og fungere i sensorfri FOC-modus.
Hvis motoren ikke fungerer tilfredsstillende eller må konfigureres for en annen driftstilstand, tilbyr motorBench en konfigurerbar prøvefil som må kompileres før den flashes. En elementær, men viktig parameter for GaN-motordrivere, er, som diskutert ovenfor, en dødtid på 50 ns eller mindre, som absolutt må kontrolleres før kompilering av HEX-filen.
Tilpassede parametere for en BLDC-motor
For å konfigurere tilpassede BLDC-motorkonfigurasjoner for sensorfri FOC-drift ved å bruke motorBench IDE-en, kan brukere måle de spesifikke motorparameterne sine og legge inn de relevante verdiene i en konfigurasjonsfil. MOT-I-81542-A-motoren fra ISL Products International, for eksempel, kan fungere som testmotor her. Den bruker ca. 361 watt, og er virksom med 24 volt og 6100 omdreininger per minutt (rpm).
Disse fire motorparametrene må først fastsettes:
- Ohmisk motstand: Denne måles mellom statorens spoleterminaler ved å bruke et multimeter
- Induktans: Målt mellom statorens spoleterminaler ved å bruke et multimeter
- Polpar: For å fastsette polparene må konstruktøren kortslutte to faser, la den tredje være åpen og deretter telle antall låsinger (latches) ved én akselomdreining for hånd, og deretter dividere resultatet med to
- Motelektromotorisk kraft (BEMF – back electromotive force): BEMF måles mellom statorens spoleterminaler ved å bruke et oscilloskop. For å gjøre dette må konstruktøren gjøre følgende:
- Klemme proben til to faseledninger, og la den tredje være åpen
- Rotere motorakselen for hånd og registrere spenningsresponsen
- Måle spiss-til-spiss-spenningen App og perioden Thalf for den største sinus-halvbølgen (figur 6).
") Figur 6: BEMF fastsettes ved å måle spiss-til-spiss-spenningen App og perioden Thalf for den største sinus-halvbølgen. (Bildekilde: EPC)
Figur 6: BEMF fastsettes ved å måle spiss-til-spiss-spenningen App og perioden Thalf for den største sinus-halvbølgen. (Bildekilde: EPC)
Med henvisning til det ovennevnte prosjekteksemplet, fastsatte Microchip følgende parametere for Teknic M-3411P-LN-08D-motoren (8,4 ARMS, åtte poler, dreiemoment = 1 Newton-meter (Nm) og en nominell effekt på 244 watt):
- App = 15,836 Vpp
- Thalf = 13,92 ms
- Polpar: pp = 4
- Mikrobrikke beregnet deretter BEMF-konstanten (for 1000 rpm = 1 krpm), ved å bruke ligning 1:
") Ligning 1
Ligning 1
 for denne eksempelmotoren
for denne eksempelmotoren
(en verdi på 10,2 ble brukt for motorBench)
- RL-L = 800 mΩ linje-til-linje motstand, minus 100 mΩ på grunn av LCR-målerledninger
- Ld = Lq = 1 mH anvendt i dette eksemplet, til tross for en måling på 932 mikrohenry (µH)
De fastsatte parametrene legges inn i motorBench-undermenyen «Configure/PMSM Motor». For å gjøre dette kan konstruktører enkelt bruke XML-konfigurasjonsfilen til en lignende motortype. Alternativt kan parametrene legges inn i en nyopprettet (tom) konfigurasjonsfil som kan importeres via «Importer Motor»-knappen.
Konklusjon
IC-er for GaN-motordriveren oppnår høy virkningsgrad i batteridrevne BLDC-motordrivere med liten formfaktor og lav vekt. Fordi de er integrert i motorhuset, er de godt beskyttet, forenkler enhetens konstruksjon og installasjon og de reduserer vedlikehold.
Konstruktører og programmerere av BLDC-motorkonstruksjoner er støttet av referansekretser, forhåndsprogrammerte modellbaserte DSP-styringer og et motorutviklingsmiljø, og de kan redusere tiden det tar å utvikle kretskonstruksjonen og fokusere mer på programutvikling.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.