Slik kan små og mellomstore bedrifter bruke et industrielt metaverse til å utforske og implementere robotløsninger raskt
Bidrag fra DigiKeys nordamerikanske redaktører
2024-11-21
Roboter og samarbeidende roboter (coboter) er helt i front når det gjelder teknologi for fabrikkautomatisering. Digitale tvillinger og virtuell virkelighet (VR) er helt i front når det gjelder design- og utviklingsverktøy. Kombinert kan de utnyttes til å skape en industriell metavers som gir høyere produktivitet raskere, selv for små og mellomstore bedrifter (SMB).
Designere i små og mellomstore bedrifter kan dra nytte av et enkelt og intuitivt grensesnitt som kombinerer en digital tvilling, en svært detaljert virtuell modell av et fysisk objekt, for eksempel en delta-, lineær- eller flerakset robot, og et tredimensjonalt (3D) VR-miljø som gjør det mulig å utføre og styre robotens bevegelsessekvenser direkte.
Ved hjelp av disse funksjonene kan man finjustere og optimalisere automasjonssystemet selv uten fysisk maskinvare, og man kan raskt utforske flere løsningsmuligheter.
I denne artikkelen går vi først gjennom skillet mellom en matematisk, databeskrevet digital tvilling og en visuell digital tvilling (VR-tvilling), og hvordan begge er nødvendige for å skape det industrielle metaverse. Deretter presenteres et robotstyringssystem og tilhørende programvare fra Igus som kan brukes til å simulere en robot på et 3D-grensesnitt (visuell digital tvilling) uten bruk av fysisk maskinvare, sammen med kompatible delta-, lineære og fleraksede roboter som kan brukes til å virkeliggjøre den optimaliserte løsningen.
Digitale tvillinger og VR er komplementære teknologier som bruker ulike visualiseringsformer, interaksjoner og maskinvare. Digitale tvillinger er databaserte modeller av fysiske objekter, systemer eller prosesser. De er utviklet for å kunne brukes gjennom hele livssyklusen til gjenstanden som modelleres, fra den første unnfangelsen til avvikling og resirkulering.
VR er en immersiv, visuelt basert teknologi som også bruker digitale modeller. I et VR-miljø er det mulig å simulere relasjoner og interaksjoner mellom objekter, for eksempel en robot som utfører en oppgave. Begge teknologiene kan brukes til design og simulering, men den digitale tvillingteknologien fokuserer på den totale livssyklusen, mens VR fokuserer på samspillet mellom fysiske objekter.
Et metaverse kombinerer digitale tvillinger og VR i et spesialbygd virtuelt miljø som støtter sanntidsinteraksjon mellom de digitale objektene og menneskene. De forbindes ofte med spill, men brukes i økende grad i forretnings- og industrivirksomhet.
Velkommen til iguverse
Igus har utviklet metaversen iguverse for å støtte ingeniørinteraksjoner i industrielle miljøer, for eksempel ved utvikling og utplassering av robotsystemer. Iguverse kan implementeres via programvaren Igus Robot Control (iRC). Dette gratis og lisensfrie programmet gjør det mulig for brukere å styre ulike typer roboter, inkludert deltaroboter, coboter (robotarmer) og kranroboter.
Det gir brukerne et 3D-grensesnitt og over 100 eksempler på programmer. Systemkravene for å implementere iRC inkluderer en PC (minimum en Intel i5 CPU) med Windows 10 eller 11 (64-bits) med 500 MB ledig diskplass og Ethernet eller trådløs nettverkstilkobling.
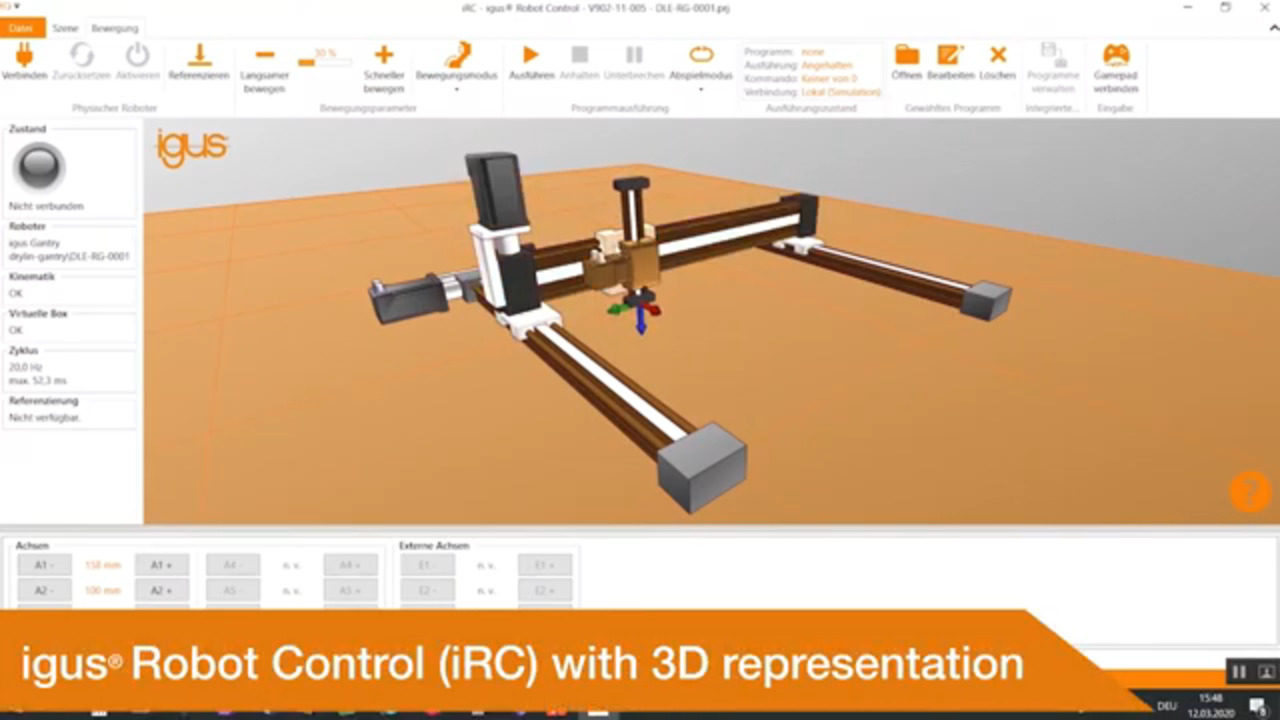
Kjernen i programvaren er en digital 3D-tvilling av roboten som programmeres. Et eksempel på dette er en treakset lineær kranrobot som modell DLE-RG-0001-AC-500-500-100 med et arbeidsområde på 500 x 500 x 100 mm eller en toakset xy-aktuator som modell DLE-LG-0012-AC-800-500 med et arbeidsområde på 800 x 500 mm (figur 1). Designere kan definere bevegelser med noen få museklikk og bruke 3D-modellen til å sikre at de ønskede bevegelsene er gjennomførbare, allerede før de kjøper roboten.
 Figur 1: Eksempel på en digital VR-tvilling i 3D av en treakset kranrobot i iguverse. (Bildekilde: Igus)
Figur 1: Eksempel på en digital VR-tvilling i 3D av en treakset kranrobot i iguverse. (Bildekilde: Igus)
I tillegg til iRC-programvaren er robotkontrolleren et sentralt element i iguverse-utviklingsmiljøet. Modellen IRC-LG12-02000 er for eksempel beregnet for 48 V-motorer, har sju innganger og sju utganger, og har en 10 m lang kabel for tilkobling til roboten. IRC-kontrollerne inkluderer motordrivmoduler for bipolare trinnmotorer i ulike størrelser, og de kan konfigureres eller forhåndskonfigureres. Den har også flere grensesnitt for systemintegrasjon, blant annet:
- Programmerbar logisk styring (PLS) for styring via de digitale inn- og utgangene, spesielt for enkel start og stopp av programmer via en PLS eller en trykknapp
- Modbus TCP-grensesnitt for styring via en PLS eller PC
- Common Robotic Interface (CRI) Ethernet for styring og konfigurasjon ved hjelp av en PLS eller PC
- Grensesnitt for robotoperativsystem (ROS) for styring av roboten ved hjelp av ROS
- Grensesnitt for kameraer med objektdeteksjon
- Grensesnitt i skyen for fjernovervåking av robotens tilstand
Understøttet kinematikk
En rekke kinematikker (grunnleggende bevegelser) som definerer robotens styrte bevegelser, støttes i iguverse. I tillegg til den forhåndskonfigurerte kinematikken kan opptil tre kinematisk uavhengige akser til konfigureres i IRC. Forhåndskonfigurert kinematikk inkluderer:
- 2-aksede og 3-aksede deltaroboter
- Kranroboter,
- 2-akset (X- og Y-akse)
- 2-akset (Y- og Z-akse)
- 3-akset (X-, Y- og Z-akse)
- Robotarmer (coboter),
- 3-akset (akse 1, 2, 3)
- 3-akset (akse 2, 3, 4)
- 4-akset (akse 1, 2, 3, 4)
- 3-akset (akse 2, 3, 4, 3)
- 5-akset (akse 1 til 5)
- 6-akset (akse 1 til 6)
- 4-akset SCARA-robot
Enkel programmering for rimelig automatisering
Igus-robotene og IRC er utviklet for å støtte rimelig automatisering. Det ville ikke vært mulig uten et brukervennlig programmeringsgrensesnitt. En 3-knappers mus eller en gamepad kan flytte og plassere en robot i iguverse. Med IRC-programvaren kan brukeren fritt bevege alle aksene på den digitale tvillingen i 3D-grensesnittet. En innlæringsfunksjon (teach-in function) støtter utviklingen av programvare for robotstyring, selv uten at en fysisk robot er tilkoblet.
For å implementere innlæringen (teach-in) flytter brukeren den virtuelle roboten manuelt til ønsket posisjon og definerer hvordan den skal bevege seg dit. Prosessen gjentas til hele bevegelsesprofilen er opprettet. Med verktøysenteret i IRC-programvaren kan brukerne enkelt legge til matchende endeeffektorer, som gripere, og automatisk justere verktøyets midtpunkt på roboten. I tillegg kan det legges til en tilkobling til et overordnet industrielt kontrollsystem.
Prosessen begynner med å aktivere roboten ved å bruke knappene "koble til", "tilbakestill" og "aktiver" etter behov i grensesnittet. Status-LED-en på IRC-enheten skal lyse grønt, og statusen skal indikere "Ingen feil" Bevegelsesprofilen kan nå legges inn ved hjelp av manuellkjøringsfanen (Jogging-fanen) (figur 2).
 in the iguverse immersive development environment (click to enlarge)") Figur 2: Fanen "Jogging" (manuellkjøring – nederst til venstre) i det immersive utviklingsmiljøet iguverse kan brukes til å legge inn bevegelsesprofiler. (Bildekilde: Igus)
Figur 2: Fanen "Jogging" (manuellkjøring – nederst til venstre) i det immersive utviklingsmiljøet iguverse kan brukes til å legge inn bevegelsesprofiler. (Bildekilde: Igus)
Kranroboter
Kranroboter, som de som inngår i de foregående eksemplene på iguverse, består av to X-akser, en Y-akse og en valgfri Z-akse. Y-aksen er festet til de to parallelle X-aksene og beveger seg frem og tilbake i det todimensjonale rommet. Den valgfrie Z-aksen støtter en tredje bevegelsesdimensjon.
Kranroboter fra Igus har selvsmørende plastforinger som glir og ruller mykere og mer stillegående enn tradisjonelle kulelagerbaserte konstruksjoner. Den nye designen er lettere, korrosjonsbestandig og vedlikeholdsfri, noe som er viktige egenskaper for små og mellomstore bedrifter. Disse robotene er også avgjørende for små og mellomstore bedrifter, og de koster opptil 40 % mindre enn tradisjonelle kranroboter, noe som gir en raskere avkastning på investeringen (ROI).
Disse robotene egner seg for to typer bruksområder: lave hastigheter med høy belastning eller høye hastigheter med lav belastning. Representative bruksområder omfatter pakking, plukk og plasser, merking, materialhåndtering og monteringsoperasjoner.
De tilbys i en rekke størrelser. Tilgjengelig tilbehør inkluderer koblinger, endeeffektorer og motorflenser. Eksempler på mellomstore kranroboter er blant annet:
- DLE-FG-0006-AC-650-650 er en todimensjonal flat kranrobot med et arbeidsområde på 650 x 650 mm. Denne roboten kan håndtere nyttelaster på opptil 8 kg og har en dynamisk hastighet på opptil 20 plukk per minutt.
- DLE-RG-0012-AC-800-800-500 er en tredimensjonal kranrobot med et arbeidsområde på 800 x 800 x 500 mm. Den kan håndtere nyttelaster på opptil 10 kg med en dynamisk hastighet på opptil 20 plukk per minutt.
Dyktig til å palletere
Palletering av produkter for forsendelse er en dagligdags aktivitet i produksjons- og logistikkvirksomheter. Det nyeste og største medlemmet i iguverse er den store XXL-kranroboten med et arbeidsområde på 2000 x 2000 x 1500 mm, som egner seg godt til palleteringsoppgaver på opptil 10 kg. Spesialtilpassede konstruksjoner med arbeidsområder på opptil 6000 x 6000 x 1500 mm er tilgjengelige.
Disse kranrobotene kan plukke deler som veier opptil 10 kg, transportere dem med en hastighet på opptil 500 mm/s og plassere dem på en pall med en repeterbarhet på 0,8 mm (figur 3). Igus' palleteringsrobotløsning koster opptil 60 % mindre enn sammenlignbare systemer.
 Figur 3: Palletering er en vanlig og viktig aktivitet i produksjons- og logistikkvirksomhet, og kan automatiseres ved hjelp av en kranrobot. (Bildekilde: Igus)
Figur 3: Palletering er en vanlig og viktig aktivitet i produksjons- og logistikkvirksomhet, og kan automatiseres ved hjelp av en kranrobot. (Bildekilde: Igus)
Delta-roboter
I likhet med kranroboter er deltaroboter tilgjengelige med to eller tre akser. Delta-roboter har et kuppelformet arbeidsområde montert over arbeidsområdet. De har svært høye hastigheter og brukes ofte til materialhåndtering og plassering av deler. Eksempler på Igus sine deltaroboter er blant annet:
- RBTX-IGUS-0047 er en treakset konstruksjon med arbeidsområde-diameter på 660 mm. Den har en nøyaktighet på ±0,5 mm, en maksimal nyttelast på 5 kg, en maksimal hastighet på 0,7 m/s og kan utføre opptil 30 plukk per minutt. (Figur 4).
- RBTX-IGUS-0059 er en 2-akset design med en arbeidsområde-diameter på 700 mm. Den har også en nøyaktighet på ±0,5 mm. Den maksimale nyttelasten er 5 kg, den maksimale hastigheten er 2 m/s, og den kan utføre opptil 50 plukk per minutt.
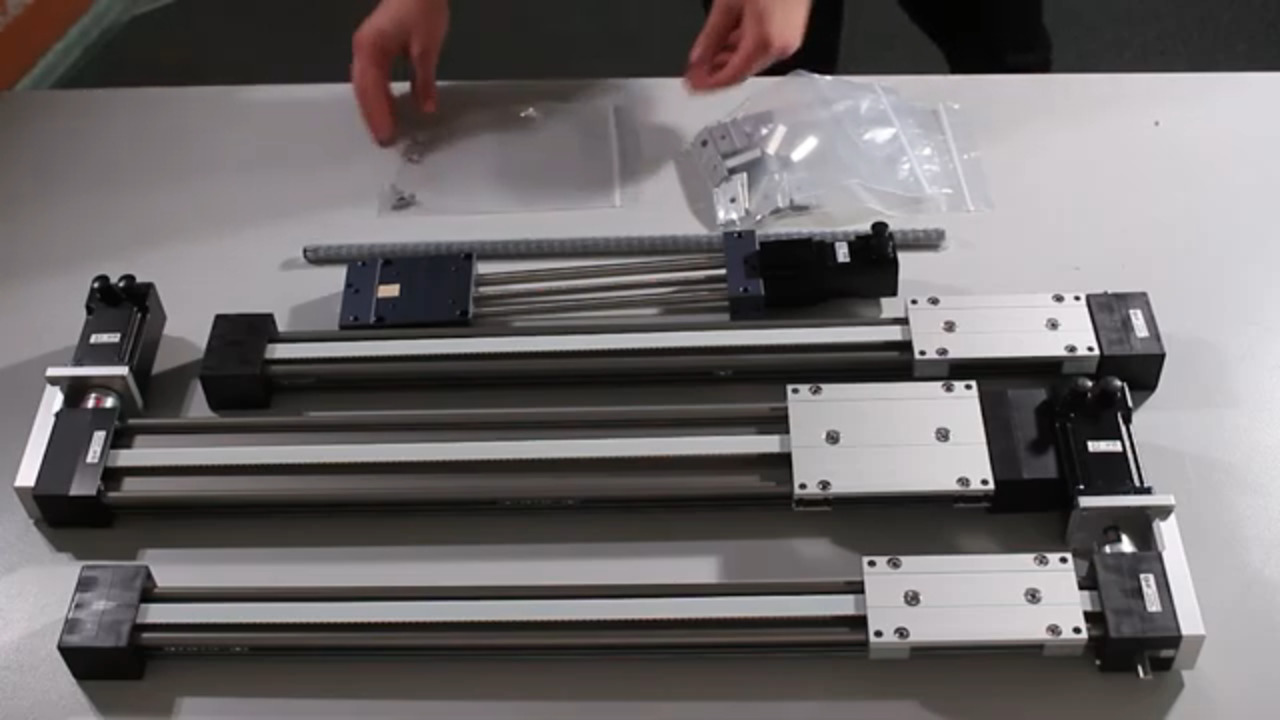
 Figur 4: Eksempel på en treakset deltarobot ved siden av en Igus iRC (til venstre). (Bildekilde: DigiKey)
Figur 4: Eksempel på en treakset deltarobot ved siden av en Igus iRC (til venstre). (Bildekilde: DigiKey)
Leddearms-coboter
Iguverse støtter også coboter med leddet arm. Coboter kan ha fra to til 10 eller flere akser, også kalt frihetsgrader (DOF). De har generelt store arbeidsområder og kan utføre komplekse oppgaver i samarbeid med en person. Igus modell REBEL-6DOF-02 har 6 DOF og modell REBEL-4DOF-02 har 4 rihetsgrader (DOF). Begge har en nøyaktighet på ±1 mm, et nominelt arbeidsområde på 400 mm og kan utføre minst 7 plukk per minutt med en lineær hastighet på 200 mm/s.
6 DOF-modellen har en maksimal nyttelast på 2 kg og en maksimal rekkevidde på 664 mm. 4 DOF-modellen har en maksimal nyttelast på 3 kg og en maksimal rekkevidde på 495 mm (figur 5).
 and 6 DOF (right)") Figur 5: Leddet arm-coboter med 4 DOF (til venstre) og 6 DOF (til høyre). (Bildekilde: Igus)
Figur 5: Leddet arm-coboter med 4 DOF (til venstre) og 6 DOF (til høyre). (Bildekilde: Igus)
Sammendrag
Det immersive industrielle metaverseet iguverse kombinerer digitale tvillinger og VR for å tilby verktøy som muliggjør rask utvikling og utrulling av robotløsninger. Det er gratis, lisensfritt og designet for å kjøre lokalt på en PC uten nettskytilkobling. Den kan brukes til å utvikle og teste robotløsninger uten at en robot er til stede.
Den støtter et bredt spekter av kinematikk i deltaroboter, kranroboter, robotarmer (coboter) og SCARA-roboter. IRC har en rekke grensesnitt for å støtte automatiserings- og driftsbehov, inkludert PLS-grensesnitt, Modbus TCP/IP, CRI Ethernet, ROS-grensesnitt, et grensesnitt for objektdeteksjonskameraer og et Cloud-grensesnitt. Iguverse, iRC og relaterte roboter fra Igus er optimalisert for å støtte små og mellomstore bedrifters behov for automatisering til lave kostnader.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.